6. Calibrating needle
Standard calibration sequence for needle valve.
Before you begin
Equipment required:
- Calibration plate
- Needle valve mounted in the head position to be calibrated
Procedure
- If the system and laptop are not already connected
and if the robot is not already homed:
- From the main button bar, click the Connect button.
- Click OK on the success prompt.
- From the main button bar, click the Home button.
- Set the Run/Maintenance keyed lock on the front control panel to Maintenance.
- Slide the calibration plate into the work area on the
conveyor rails until it is snug against the board stops at 0,0 position.
Figure 5-2. Calibration plate (PN 23116001) 
- Calibrate needle:
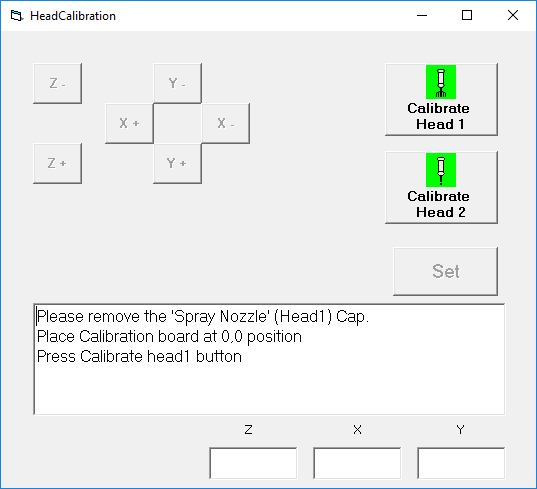
- From the main menu, select The Head Calibration window displays.
-
Click the applicable button: Calibrate Head 1 or Calibrate Head 2. CAUTION
CAUTION
- Using the X and Y jog buttons, center the tip of the needle over the hole in the calibration plate.
- Using the Z axis jog buttons, adjust the tip of needle so it is positioned just above the surface of the calibration plate.
- Click the Set button.
- Click the OK button for each location prompt, and then select YES for the overall offset prompt.
- Use the Z- button to raise the needle upward, away from the calibration plate.
- From the main menu, select
- If a second needle/head position needs to be calibrated, repeat the prior “Calibrate needle” step for that head.
- Remove the calibration plate from the work area and store for future use.
- Close the Head Calibration window.
- Click the Home button.
- Set the Run/Maintenance keyed lock on the front control panel to Run.